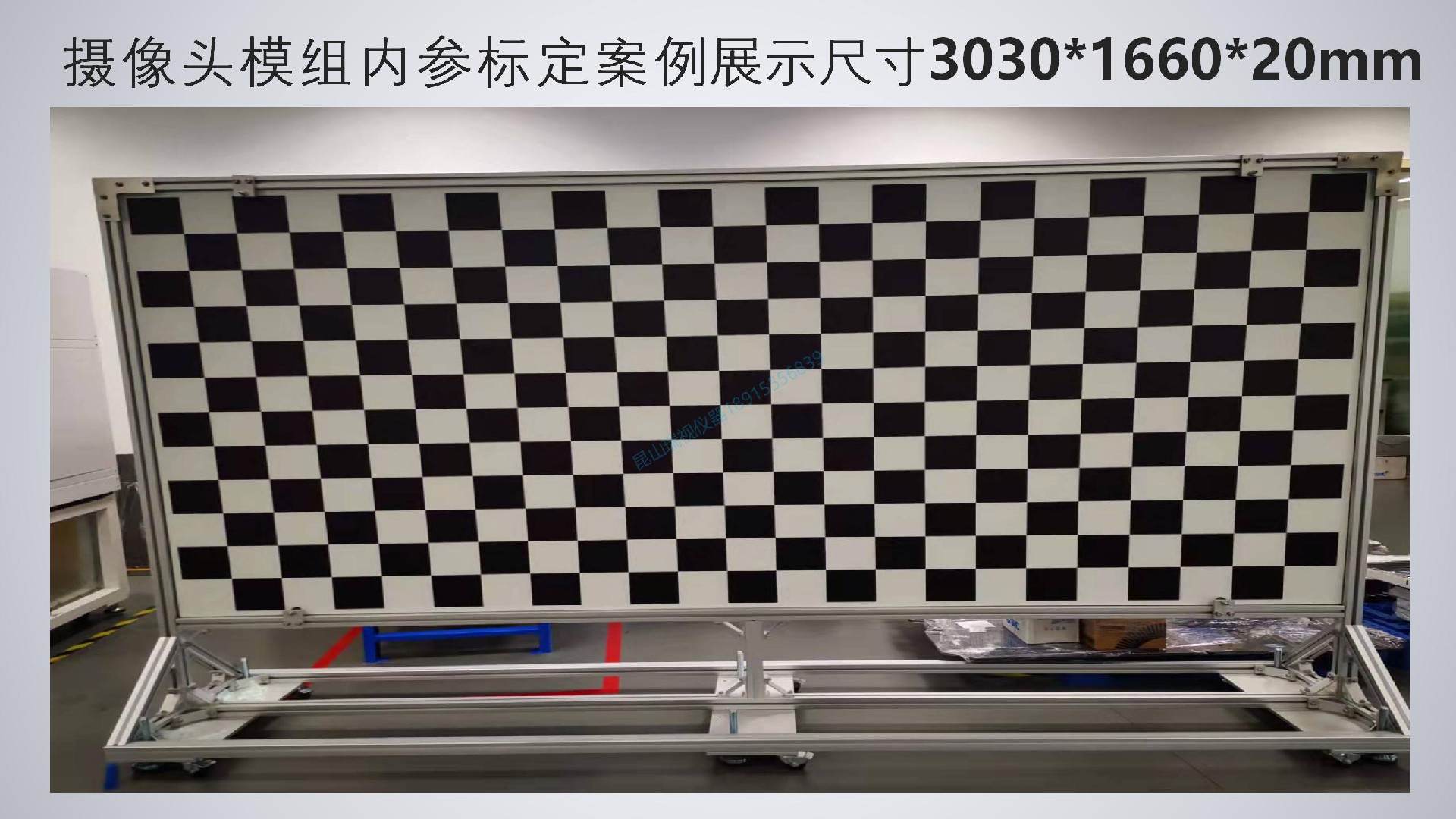
棋盘格标定板外形3030*1800*20mm,精度0.005mm,航空铝材质,无反光,支持定制。
标定板表面加工出相机标定实验的棋盘格,能够较为精确地产生视觉系统测量的特征点,即棋盘格的角点:在标定板的黑鱼区域镂空员子 员孔与黑鱼正方形同中心,3d激光雷达通过扫描镂空区域特征,计算圆孔中心点三维坐标作为激光测量系统的特征点。此方法能够便捷和准确地实现两种传感器在一次标定实验中同时完成数据采集。将3d激光雷达获取的圆孔中心点三维坐标利用式(4)转化为相机坐标系下的三维坐标,即可确定联合测量系统下角点和中心点的测量距离;与其在标定板上的理论距离进行比较可求得联合测量误差,通过非线性优化联合测量误差解得两种传感器之间的旋转矩阵r和平移向量t,实现对视觉系统和激光系统的联合标定。22联合标定流程
联合标定算法具体步骤如下,
1)采用张氏标定获得立体相机的内外参数,通过采集棋盘格标定板图像,将棋盘格角点作为视觉系统的特征点,提取角点的二维像素坐标,按照双目视觉算法还原角点在相机坐标系下的三维坐标。
2)3d激光传感器系统经过自标定获得自身内外参数,通过扫描标定板镂空圆孔区域,获取圆孔中心点在
3d激光测量系统坐标系下的三维坐标。将中心点作头
3d激光系统的特征点,为了建立两种传感器坐标系之间的联系,需要将3d激光坐标系下中心点的三维坐标按照一定的关系转换到相机坐标系下的三维坐标。
3)按照上述步骤,计算相机坐标系下角点和相对应中心点的实际测量距离,最终通过最小化特两组征点之间的理论与实际测量距离的平方差,从而获取两传感器坐标系之间的旋转矩阵和平移向量。