自动驾驶汽车标定
无人驾驶中感知模块负责获取和理解其周围的场景信息, 其性能和可靠性是 整个无人驾驶系统的关键环节之一, 直 接影响下游的定位、路线规划和决策 等控制链。通过融合 多种感知传感器的数据, 提高系统在复杂场景下的感知 能 力是无人驾驶发展的主要方向。然而无论是摄像头、毫米 波雷达还是激光 雷达, 都有自己的坐标系, 即传感器产生 的数据都是基于自身坐标系的。将 各传感器转换到统一坐 标系的过程便是传感器的外参标定。
而激光雷达点云数据包含以自身为参考原点的物体3 d 坐标信 息。当多个雷达 拼接以获得更大范围3 d 覆盖时, 通过外参将 各个激光雷达统一到全局坐标系, 便能把各个雷达的点云很 好地拼接起来,
在实际使用中, 有时不方便找到用于标定的开源环境或参 考物体, 为此 l i v o x 推出了自动标定技术t f a c - l i v o x 算 法( t a r g e t - f r e e a u t o m a t i c c a l i b r a t i o n ) 并在g i t h u b 上开源。该技术主要依靠几何一致性假设, 即多个 雷达 扫描出来的局部三维模型是一致的, 通过对基准雷达( l i d a r 0 ) 进行移 动建图, 然后将其余雷达数据对l i d a r 0 的重 建地图不断进行迭代配准与计 算, 依靠一致性假设不断减 少匹配误差, 直到算法收敛并且满足标定矩阵刚 性不变特 性( 六条平行线) , 最后用一致性算法得出最终标定矩阵.
助力工业智能

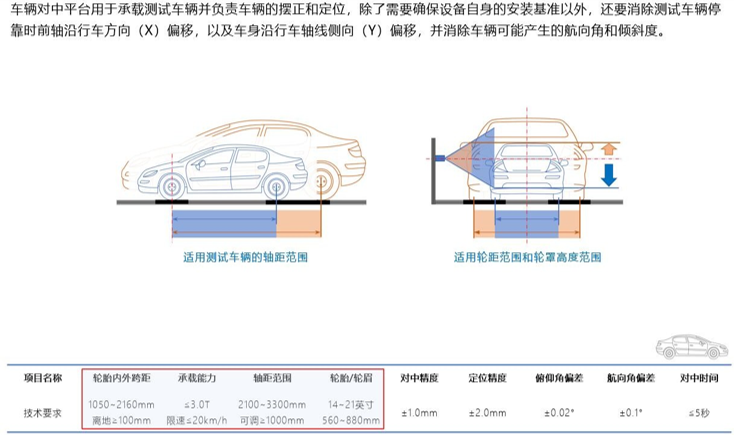
自动驾驶汽车标定车辆对中装置介绍-气缸推动
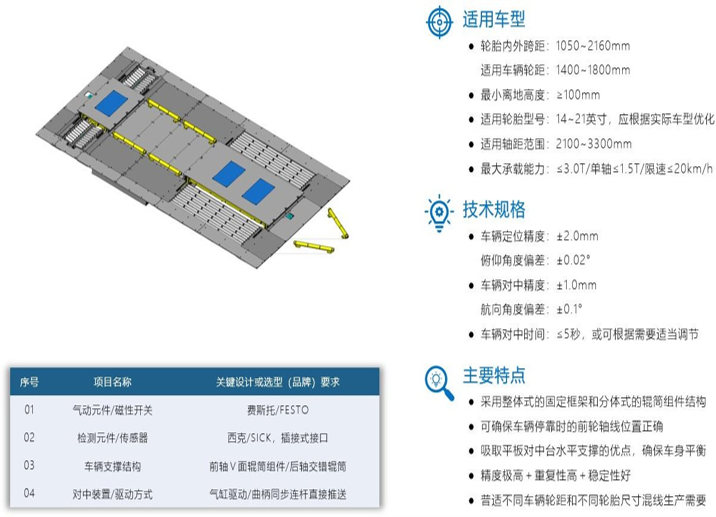

瑞视仪器辅助驾驶车辆对中台介绍